Energy-aware robot control in physical human-robot interaction:
For certification process of applications in physical human–robot interaction (pHRI), two major hazards are collisions and clamping scenarios. The implementation of safety measures in pHRI applications typically depends strongly on coordinates, e.g., to monitor the robot velocity or to predict external forces. In general, the current certification process does not guarantee a safe robot behavior. In particular, in unstructured environments it is not possible to predict all risks in advance.
We therefore propose to control the energy of the robot, which is a coordinate invariant entity. For an impedance controlled robot, the total energy consists of potential energy and kinetic energy. The energy flow from task description to physical interaction follows a strict causality. We assign a safe energy budget for the robot. With this energy budget, the presented controller auto-tunes its parameters to limit the exchanged kinetic energy during a collision and the potential energy during clamping scenarios. In contact, the robot behaves compliantly and therefore eliminates clamping danger. After contact, the robot automatically continues to follow the desired trajectory. With this approach the number of safety-related parameters to be determined can be reduced to one energy value, which has the potential to significantly speed up the commissioning of pHRI applications. The proposed technique is validated by experiments.
Causality of energy flow during physical interaction
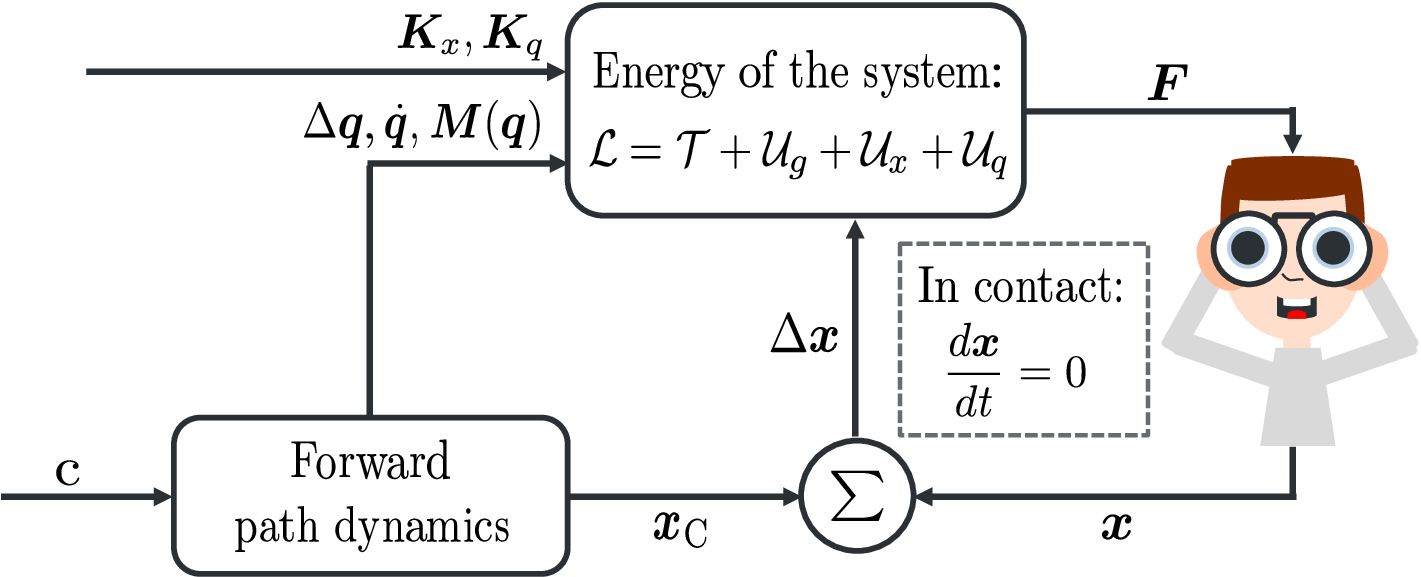
The interaction between the robot and its environment can be represented by an equivalent network. For a given control input, the robot controller calculates a desired control motion. The contact between robot and human takes place at the interaction port (𝐹 , 𝑉). In a collision, the energy that is flowing bi-directionally between the robot and the human can be modeled at this port. If the robot behaves like a mechanical impedance, its output is a force (effort) and the input is a displacement (time-integral of flow). The connected subsystem (in our case the human) is exposed to this force 𝐹 and influences the robot displacement 𝑥. In a contact scenario, the amount of transferred energy is determined by the energy of the robotic system, i.e., kinetic and potential energy.
For an impedance controlled robot, the energy flow from the information domain (control command) to the energy domain (physical interaction) follows a strict causality. First, the robot is exposed to the impedance potential 𝒰. Once the robot starts moving, 𝒰 is transferred to 𝒯. In case of a collision, 𝒯 is exchanged with the human. As the skin is deformed elastically, the contact can be modeled as an energy transfer from kinetic energy to potential energy. In a quasi-static contact, 𝒯≈0 and the human is only affected by 𝒰, which generates a clamping force at the interaction port. The controlled motion and constant robot position 𝑥 leads to an increase of 𝒰 and therefore to an increase of 𝐹.
Video
Related Publications
J. Lachner, F. Allmendinger, E. Hobert, N. Hogan and S. Stramigioli, “Energy budgets for coordinate invariant robot control in physical human–robot interaction,” The International Journal of Robotics Research, 2021.
[LINK]
J. Lachner, S. Stramigioli, “Method and system for operating a robot,” Patent DE102020209866B3, 2021.
[LINK]
J. Lachner, “A geometric approach to robotic manipulation in physical human-robot interaction,” PhD Thesis, 2022.
[LINK]
Acknowledgements
This work was developed together with Eddo Hobert, who did a part of this work during his internship at KUKA Corporate Research.