A Physically Consistent Stiffness Formulation for Contact-Rich Manipulation
Ensuring symmetric stiffness in impedance-controlled robots is crucial for physically meaningful and stable interaction in contact-rich manipulation. Conventional approaches neglect the change of basis vectors in curved spaces, leading to an asymmetric joint-space stiffness matrix that violates passivity and conservation principles. In this work, we derive a physically consistent, symmetric joint-space stiffness formulation directly from the task-space stiffness matrix by explicitly incorporating Christoffel symbols. This correction resolves long-standing inconsistencies in stiffness modeling, ensuring energy conservation and stability.We validate our approach experimentally on a robotic system, demonstrating that omitting these correction terms results in significant asymmetric stiffness errors. Our findings bridge theoretical insights with practical control applications, offering a robust framework for stable and interpretable robotic interactions.
Geometric Foundations
To describe stiffness in a physically consistent way, we employ tensor calculus as the mathematical language.
Unlike matrix formulations that depend on a chosen coordinate frame, tensors preserve their meaning under coordinate transformation, providing a coordinate-invariant representation of how forces and displacements relate on curved manifolds such as SE(3).
The evolution of the local basis vectors is governed by an affine connection, which defines how vectors are transported between tangent spaces. The associated Christoffel symbols quantify this local curvature, capturing how coordinate bases deform when the robot interacts with its environment and moves away from the equilibrium pose.
By explicitly incorporating these connection terms into the stiffness definition, we correct for curvature-induced asymmetries and obtain a symmetric, energy-consistent stiffness formulation.
Experimental Validation
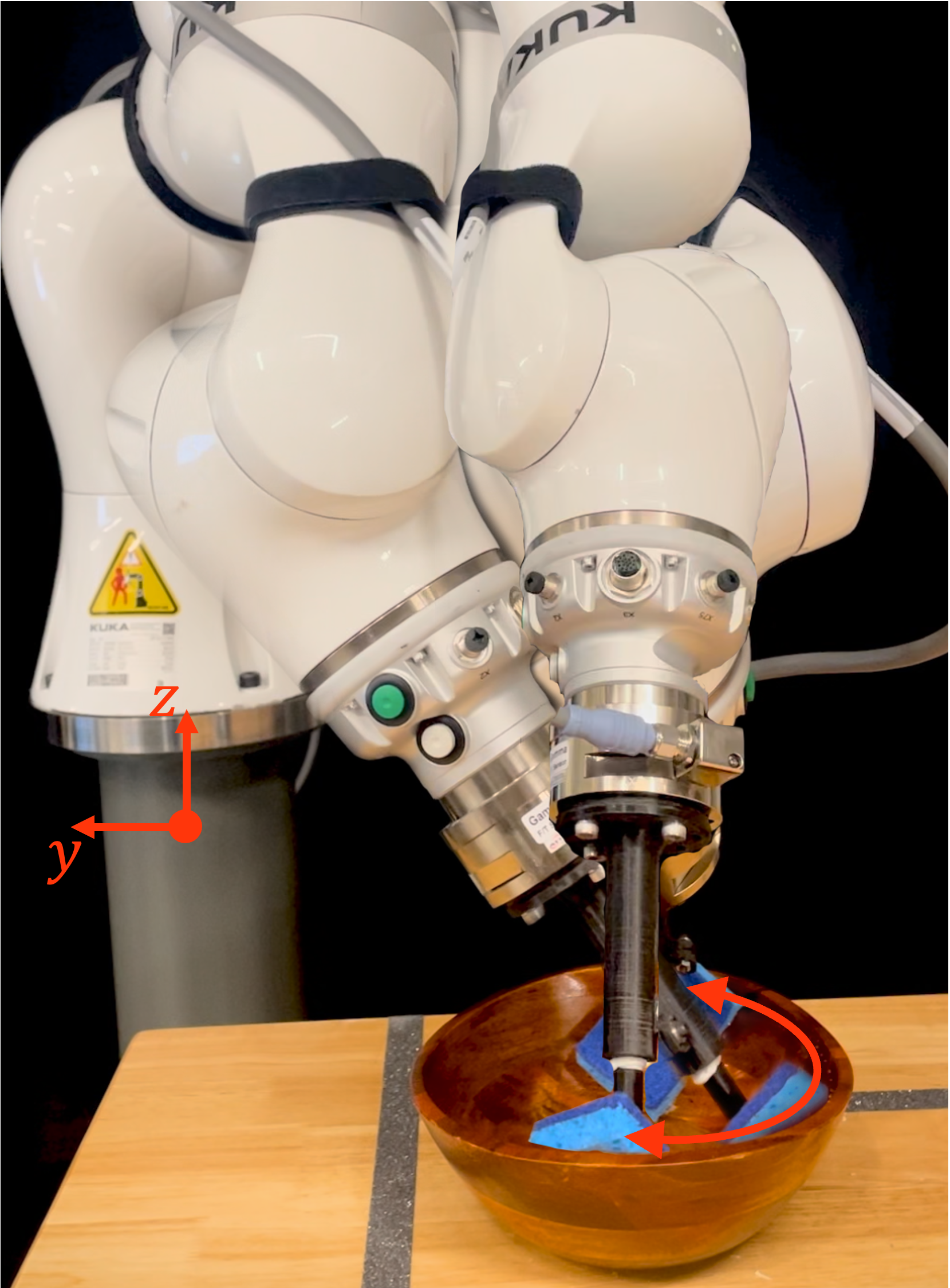
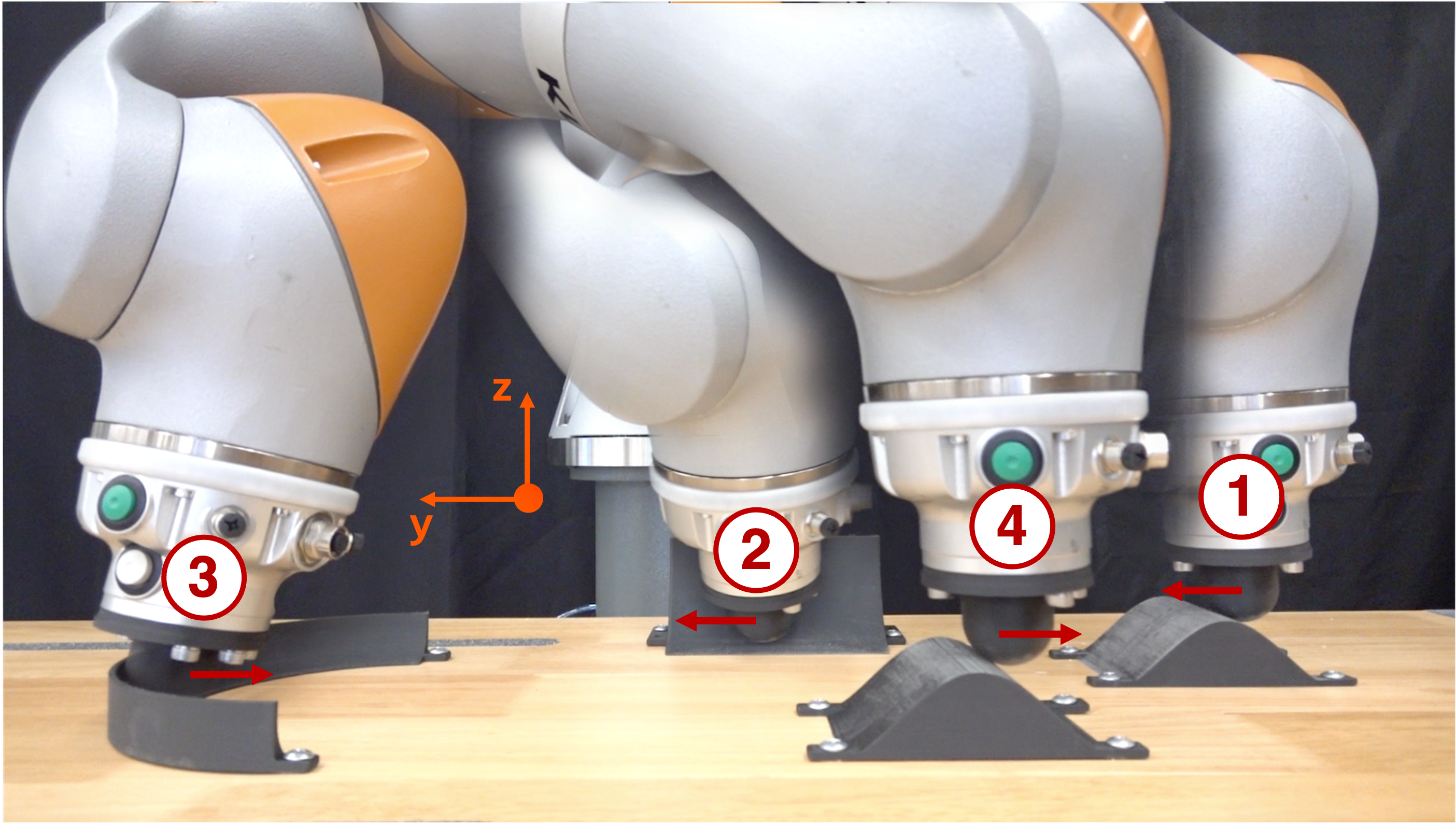
The proposed formulation was validated on a KUKA LBR iiwa robot performing two contact-rich tasks: 1) Parkour obstacle traversal (picture left); 2) Bowl wiping (picture right).
Neglecting the Christoffel correction led to pronounced stiffness asymmetries, generating an accumulation of energy, that produced torques of 8–18 Nm/rad arising from asymmetry. Including the correction restored symmetry and eliminated artificial energy gain, without affecting trajectory-tracking accuracy.
All experiments were implemented using our open-source Exp[licit] framework for kinematic and dynamic modeling.
Related Publications
J. Lachner, M.C. Nah, and N. Hogan, “A Physically Consistent Stiffness Formulation for Contact-Rich Manipulation,” The International Journal of Robotics Research, 2025. [Github repo]